LABORATORIO NRO 3
PROGRAMACIÓN CON DISPLAY DE 7 SEGMENTOS
1. OBJETIVOS
2. MATERIALES Y EQUIPOS- Conocer el Display de 7 segmentos y su funcionamiento
- Conocer las técnicas de multiplexación
- CCS Compiler instalado.
- Entrenador de PICS
- Pantalla LCD
- PIC16F877A
- Guía de Laboratorio. El trabajo se desarrolla de manera GRUPAL.
- PC con Software de simulación.
3. FUNDAMENTO TEÓRICO
3.1. Tipos de variables
Todos los programas necesitan, en algún momento, almacenar números o datos ingresado por el usuario. Estos datos son almacenados en variables que deben tener un tipo. Para declarar una variable en la programación se debe hacer de la siguiente forma:
tipo nombreVariable;
Si se quiere asignar el valor se designa así:
tipo nombre_variable = valor inicial;
3.1.1 bool
Por lo general utiliza 1 byte de memoria, valores: true o false.
3.1.2 char
Utiliza generalmente 1 byte de memoria, permite almacenar un carácter, valores; 256 caracteres.
3.1.3 unsigned short int
Utiliza generalmente 2 bytes de memoria, valores: de 0 a 65 535
3.1.4 short int
Utiliza generalmente 2 bytes de memoria, valores: de -32768 a 32767.
3.1.5 unsigned long int
Utiliza generalmente 4 bytes de memoria, valores: de 0 a 4 294 967 295.
3.1.6 long int
Utiliza generalmente 4 bytes de memoria, valores: de -2 147 483 648 a 2 147 483 647.
3.1.7 int (16 bits)
Utiliza generalmente 2 bytes de memoria, valores: de -32 768 a 32 767.
3.1.8 int (32 bits)
Utiliza generalmente 4 bytes de memoria, valores: de -2 147 483 648 a 2 147 483 647.
3.1.9 unsigned int (16 bits)
Utiliza generalmente 2 bytes de memoria, valores: de 0 a 65 535.
3.1.10 unsigned int (32 bits)
Utiliza generalmente 2 bytes de memoria, valores: de 0 a 4 294 967 295.
3.1.11 double
Utiliza generalmente 8 bytes de memoria, valores: de 2.2e-308 a 3.4e-38.
3.1.12 float
Utiliza generalmente 4 bytes de memoria, valores: de 1.2e-308 a 3.4e-38.
Atención!
El tamaño de las variables en memoria puede variara de un PC a otro.

Todos los programas necesitan, en algún momento, almacenar números o datos ingresado por el usuario. Estos datos son almacenados en variables que deben tener un tipo. Para declarar una variable en la programación se debe hacer de la siguiente forma:
tipo nombreVariable;
Si se quiere asignar el valor se designa así:
tipo nombre_variable = valor inicial;
3.1.1 bool
Por lo general utiliza 1 byte de memoria, valores: true o false.
3.1.2 char
Utiliza generalmente 1 byte de memoria, permite almacenar un carácter, valores; 256 caracteres.
3.1.3 unsigned short int
Utiliza generalmente 2 bytes de memoria, valores: de 0 a 65 535
3.1.4 short int
Utiliza generalmente 2 bytes de memoria, valores: de -32768 a 32767.
3.1.5 unsigned long int
Utiliza generalmente 4 bytes de memoria, valores: de 0 a 4 294 967 295.
3.1.6 long int
Utiliza generalmente 4 bytes de memoria, valores: de -2 147 483 648 a 2 147 483 647.
3.1.7 int (16 bits)
Utiliza generalmente 2 bytes de memoria, valores: de -32 768 a 32 767.
3.1.8 int (32 bits)
Utiliza generalmente 4 bytes de memoria, valores: de -2 147 483 648 a 2 147 483 647.
3.1.9 unsigned int (16 bits)
Utiliza generalmente 2 bytes de memoria, valores: de 0 a 65 535.
3.1.10 unsigned int (32 bits)
Utiliza generalmente 2 bytes de memoria, valores: de 0 a 4 294 967 295.
3.1.11 double
Utiliza generalmente 8 bytes de memoria, valores: de 2.2e-308 a 3.4e-38.
3.1.12 float
Utiliza generalmente 4 bytes de memoria, valores: de 1.2e-308 a 3.4e-38.
Atención!
El tamaño de las variables en memoria puede variara de un PC a otro.
3.2. Display de siete segmentos
3.2.1. Principio de funcionamiento

Tabla de verdad display 7 segmentos anodo y catodo comun
En nuestro entrenador, se usan los display de ánodo común para mostrar el número. Esta tabla la colocamos en la programación en el orden de 0 a 9, para que se envien los datos correctamente al display
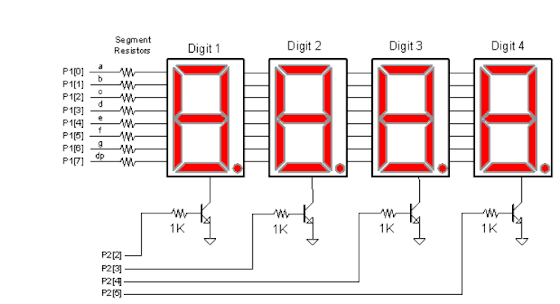
3.2.1. Multiplexación
El multiplexado nos ayuda a que no usemos tantos pines de nuestro microcontrolador usando los cuatro display que estan disponibles. Esta técnica se basa en encender y apagar cada dígito de manera muy rápida, de forma tal que este cambio sea imperceptible a los ojos, aproximadamente cada 5ms.Por tanto, las ventajas son:– Reducción de componentes en la placa.
– Economizamos nuestro proyecto.
– Menor utilización de pines.
4. VÍDEO
5. OBSERVACIONES
- Se crearon subrutinas qe funcionaban repetidamente en la programación, para lo cual solo basto que sean llamadas en otras.
- En el entrenador para que opere correctamente se debe accionar los switch de los puertos a ser usados, además de presionar un pulsador con enclavamiento.
- Se observó que se necesitaron declarar varias variables para habilitar y deshabilitar algunos pines
- Se llamo a un retardo para que evitar que se produzcan falsas pulsaciones
- Se creo una tabla para los display referidos al anodo común para que cuando introduzcamos el valor deseado en sistema decimal, este se pueda mostrar en el display
6.CONCLUSIONES
- Se conoció el funcionamiento de los display de siete segmentos, su configuración interna y como se debe realizar su conexiado
- Se concluye que cuando aplicamos la técnica de multiplexación se obtiene diversos beneficios, como son la reducciónde utilización de los pines del microcontrolador, por lo tanto reduciendo el costo.
- Se uso un bucle for para crear un tren de pulsos que sirve al encender un sounder ya que este necesita que la señal varíe
- Se descompuso el numero que se quería mostrar usando un bucle
- Se conocieron los tipos de variables, cuantos bits pueden almacenar, como deben ser declaradas y se entendió la importancia de las mismas en la programación
7. INTEGRANTES
- Corimanya Castelo, Laura Milagros


