LABORATORIO NRO 11
SALIDAS PWM DEL ARDUINO
1. OBJETIVOS
- Programar la tarjeta ARDUINO UNO utilizando entrada analogica y salida PWM
- Conocer el correcto funcionamiento de los pines digitales PWM
- Conocer la función de ma
- IDE Arduino
- Tarjeta ARDUINO UNO
- Componentes accesorios.
- Guía de Laboratorio.
- PC con Software de simulación
3. FUNDAMENTO TEÓRICO
3.1. ENTRADAS ANALÓGICAS
Supongamos que dispongamos un sensor analógico que proporciona una señal analógica entre 0V a 5V. El esquema de conexión es similar al que empleamos para realizar la lectura digital.
3.1. ENTRADAS ANALÓGICAS
Supongamos que dispongamos un sensor analógico que proporciona una señal analógica entre 0V a 5V. El esquema de conexión es similar al que empleamos para realizar la lectura digital.
Una señal analógica es una magnitud que puede tomar cualquier valor dentro de un intervalo –Vcc y + Vcc. Por ejemplo, una señal analógica de tensión entre 0V y 5V podría valer 2,72V, o cualquier otro valor con cualquier número de decimales. Por contra, recordemos que una señal digital de tensión teórica únicamente podía registrar dos valores (en el ejemplo, 0V o 5V).
 3.2. SALIDAS PWM
3.2. SALIDAS PWM
La mayoría de automatismos incluido Aduino no son capaces de proporcionar una auténtica salida analógica. Ni siquiera pueden suministrar una salida analógica discretizada (es decir, a saltos) de tensión. Lo único que pueden proporcionar es una salida digital de -Vcc o Vcc. (por ejemplo, 0V y 5V)
Existe más de una forma de hacer esta aproximación. Una de las más sencillas, y por ello muy empleada en automatización, es la modulación de ancho de pulso (PWM). En esta modulación se mantiene constante la frecuencia (es decir, el tiempo entre disparo de pulsos), mientras que se hace variar la anchura del pulso.
La mayoría de automatismos incluido Aduino no son capaces de proporcionar una auténtica salida analógica. Ni siquiera pueden suministrar una salida analógica discretizada (es decir, a saltos) de tensión. Lo único que pueden proporcionar es una salida digital de -Vcc o Vcc. (por ejemplo, 0V y 5V)
Existe más de una forma de hacer esta aproximación. Una de las más sencillas, y por ello muy empleada en automatización, es la modulación de ancho de pulso (PWM). En esta modulación se mantiene constante la frecuencia (es decir, el tiempo entre disparo de pulsos), mientras que se hace variar la anchura del pulso.
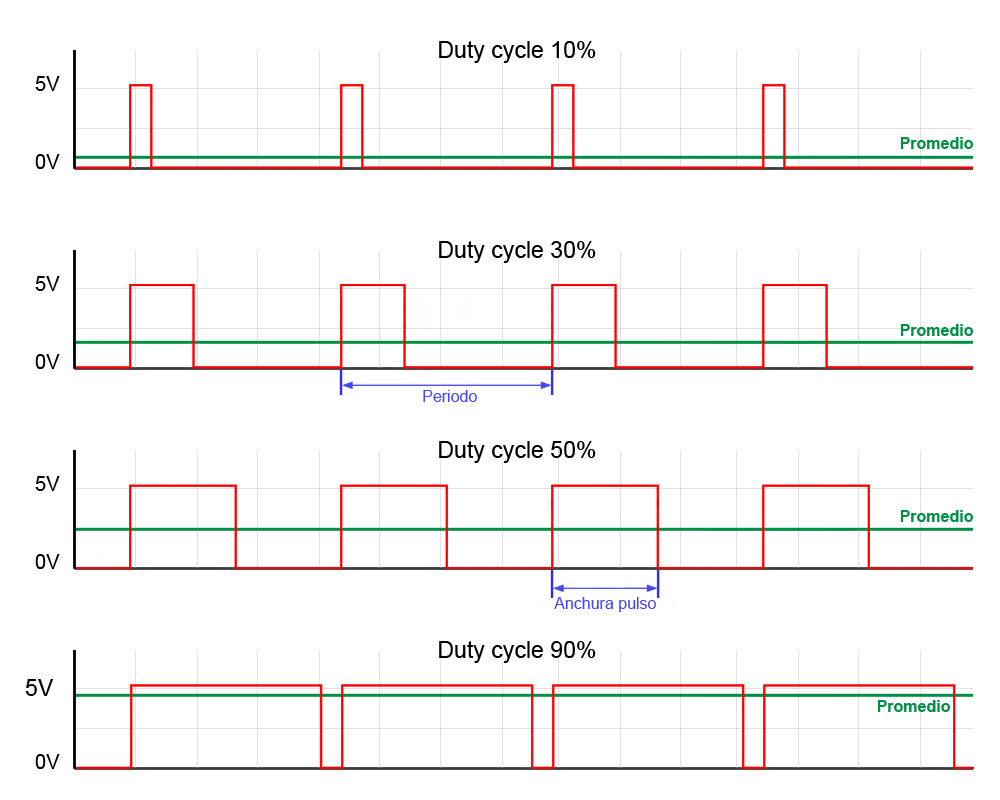
Es inmediato deducir que la señal promedio es el producto de la tensión máxima y el DutyCycle, según la siguiente expresión.

De forma similar, tenemos que

CONEXIONADO

PROGRAMACIÓN


https://drive.google.com/file/d/1YbJDwY9EJZSNkCfzaomIbF1S0Q-lhkyA/view?usp=sharing
6. OBSERVACIONES
- Se observó que para el caso del switch case el tiempo de ejecución es más rápido
- Es necesario colocar un delay de un tiempo adecuado para que los datos impresos en el monitor serial no sean tan rápidos
- Solo algunos pines del arduino presentan modulacón por ancho de pulso
- Existen 6 pines para entradas analógicas lo cuál es bastante considerable
7.CONCLUSIONES
- Programamos la tarjeta ARDUINO UNO leyendo el valor de una entrada analógica y obteniendo como salida una señal similar a la analógica con PWM
- Conocimos como configurar una salida PWM en arduino y como fucniona esta al variar la frecuencia
- Se logró trabajar con señales analógicas, leyendo el valor mediante analogRead
- Se trabajo con la estructura del Switch Case, que nos permite evaluar cada caso y ejecutar una serie de condiciones
8. INTEGRANTES
- Corimanya Castelo, Laura Milagros